Currently, GPS is the most used navigation system for outdoors. It provides location, altitude and speed through GPS satellites and it offers an accuracy down to a few meters. However, the accuracy of the system in indoors is bad, which makes it useless for navigation and positioning in this environment.
Today smartphones have full GPS capability onboard but it is also useless for indoor navigation. Nevertheless, the combination of other connectivity capabilities such are WiFi or 3G with the built-in motion and position sensors offers many possibilities for the future of indoor positioning. In this post I will discuss some of the techniques that can be used for indoor positioning taking advantage of the smartphones capabilities.
Distance and bearing
The first approach consist off determining the distance and bearing (angle between two points measured in a clockwise direction from the north line) between two points. The distance and bearing could be calculated through the A-GPS, a set of location sensors that combines GPS location, network positioning and cellular positioning. The figure below shows how to determine the angle between two points. However, this approach is not useful using the A-GPS because of its bad accuracy of location in indoors (10m). location by triangulation using several WiFi or blueetoth hotspots.

Distance and bearing using WiFi and Blueetoth hotspots (requieres additional installation)
This method requieres the installation of WiFi or Blueetoth transmitter every few meters. Distance and bearing can be approximated based on the relationship between transmitted and received signal strength. The problem of this solution is that accuracy is significantly impacted by reflection and absorption from walls. Moreover, measurements can be extremely noisy so there is a lot of ongoing research focused on making more accurate systems by using statistics to filter out the inaccurate input data.
Integration of the acceleration
The second approach uses the double integration of the linear acceleration (acceleration of the device minus the acceleration due to gravity) to measure position, like the following equation shows. However, double integration amplifies acceleration noise so fast. The acceleration readings from the smartphone’s sensors are very noisy, making this approach useless for most of the systems.

Inertial measurements
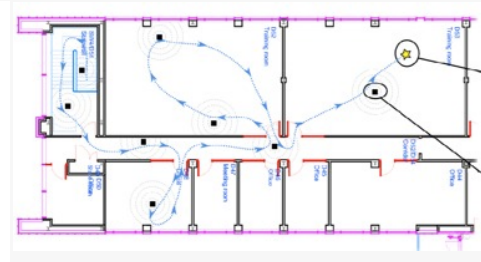
The third approach consists of the development of algorithms based on the detection of steps and heading directions while walking. The positioning might be reliable using the accelerometer and gyroscope sensors, and with an accurate estimation of the step length.
Currently, this seems the best approach for reliable indoor positioning using only smartphones and without any additional installation. This system is specially useful if the measurement of the steps is referred to maps or additional sensors (using sensor fusion) to constrain the inherent sensor drift encountered with inertial navigation.